|
I am an ECE Ph.D. student at Duke University, advised by Prof. Miroslav Pajic. Previously, I obtained my EEE B.S. at Yonsei University, Republic of Korea, where I was fortunate to be advised by Prof. Jongeun Choi. I am interested in Generative AI, Efficient AI, Representation Learning, and Reinforcement Learning. My research focuses on developing efficient and multi-modal AI for task execution in dynamic environments. During my undergraduate studies, I explored the application of equivariance and representation theory to robotic manipulation. Currently, I am investigating generative models to develop efficient policies for real-world robotic policies. |

|
|
|
|
|
Hyunwoo Ryu, Jiwoo Kim, Junwoo Chang, Hyun Seok Ahn, Taehan Kim, Yubin Kim, Joohwan Seo, Jongeun Choi, Roberto Horowitz CVPR, 2024 Highlight (11.9% of accepted papers) Project Page / Arxiv / Code We present Diffusion-EDFs, a novel approach that incorporates spatial roto-translation equivariance, i.e., SE(3)-equivariance to diffusion generative modeling. |

|
Junwoo Chang*, Hyunwoo Ryu*, Jiwoo Kim, Soochul Yoo, Joohwan Seo, Nikhil Prakash, Jongeun Choi, Roberto Horowitz Neurips Workshop on Diffusion Models, 2023 Project Page / Arxiv We present a method that, during inference time, simultaneously generates only reachable goals and plans motions that avoid obstacles, all from a single visual input. |
|
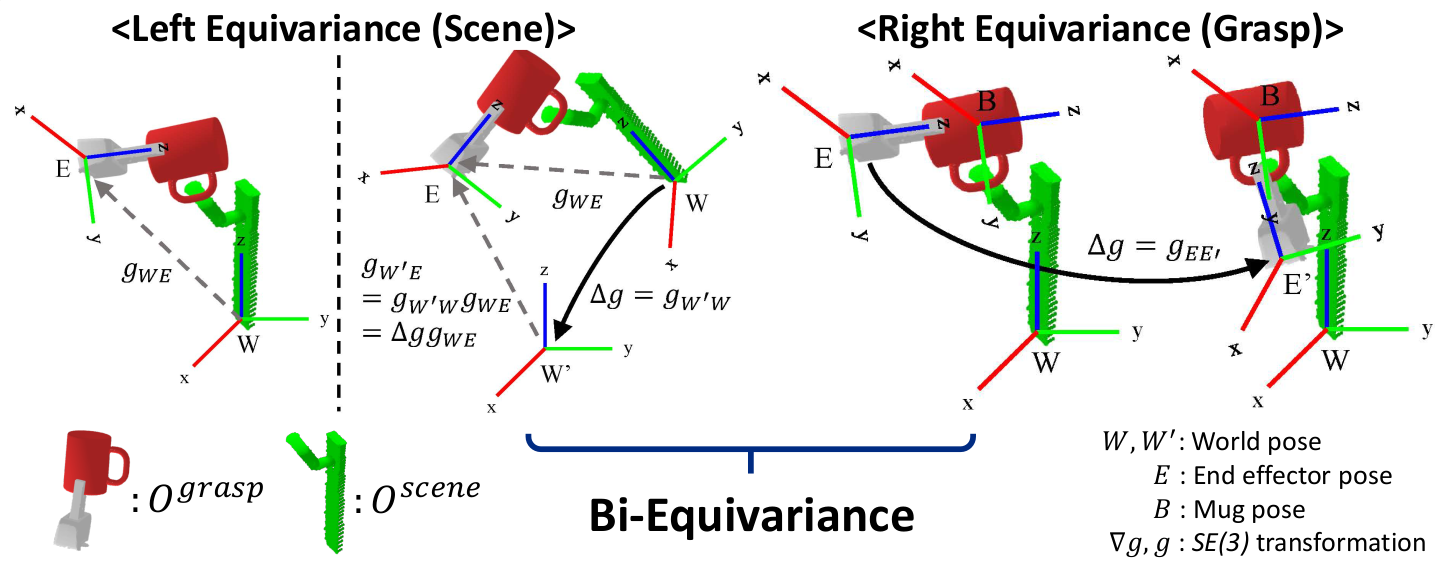
Jiwoo Kim*, Hyunwoo Ryu*, Jongeun Choi, Joohwan Seo, Nikhil Prakash, Ruolin Li, Roberto Horowitz RSS Workshop on Symmetries in Robot Learning, 2023 Oral, Best Paper Award OpenReview We introduce the recently proposed Equivariant Descriptor Fields (EDFs), focusing on the four key model properties: generative modeling, bi-equivariance, steerable representation, and locality. |
|
|
|
The 5th Yonsei University Mechanical Engineering Graduate Student Academic Conference, 2023 Best Demo Presentation |
|
|